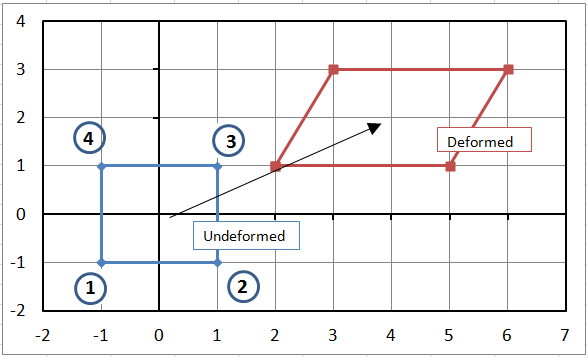
The node displacements are
\[ \begin{eqnarray} u_1 = 3 \qquad u_2 = 4 \qquad u_3 = 5 \qquad u_4 = 4 \\ v_1 = 2 \qquad v_2 = 2 \qquad v_3 = 2 \qquad v_4 = 2 \end{eqnarray} \]
The deformation gradient components are
\[ \begin{eqnarray} F_{11} & = & {1 \over 4} [-(1-Y)u_1 + (1-Y)u_2 + (1+Y)u_3 - (1+Y)u_4] + 1 \\ \\ & = & {1 \over 4} [-u_1 + u_2 + u_3 - u_4] + 1 \\ \\ \\ & = & 1.5 \\ \\ F_{12} & = & {1 \over 4} [-(1-X)u_1 - (1+X)u_2 + (1+X)u_3 + (1-X)u_4] \\ \\ & = & {1 \over 4} [-u_1 - u_2 + u_3 + u_4] \\ \\ \\ & = & 0.5 \\ \\ F_{21} & = & {1 \over 4} [-(1-Y)v_1 + (1-Y)v_2 + (1+Y)v_3 - (1+Y)v_4] \\ \\ & = & {1 \over 4} [-v_1 + v_2 + v_3 - v_4] \\ \\ \\ & = & 0.0 \\ \\ F_{22} & = & {1 \over 4} [-(1-X)v_1 - (1+X)v_2 + (1+X)v_3 + (1-X)v_4] + 1 \\ \\ & = & {1 \over 4} [-v_1 - v_2 + v_3 + v_4] + 1 \\ \\ \\ & = & 1.0 \end{eqnarray} \]
\[ {\bf F} = \left[ \matrix{ 1.5 & 0.5 \\ 0.0 & 1.0 } \right] \]
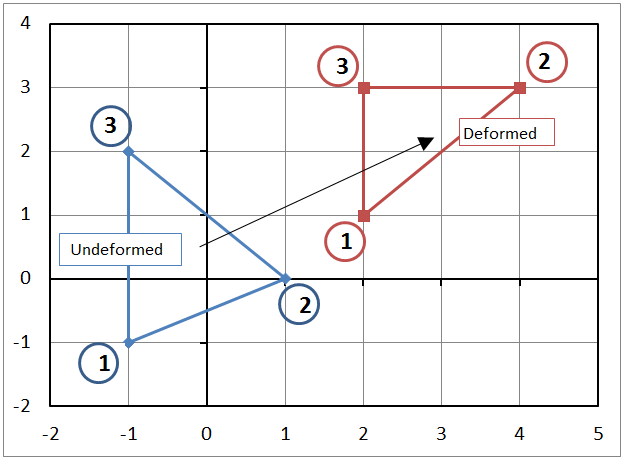
The undeformed node coordinates are
\[ \begin{eqnarray} X_1 = -1 & \qquad X_2 = 1 & \qquad X_3 = -1 \\ \\ Y_1 = -1 & \qquad Y_2 = 0 & \qquad Y_3 = 2 \end{eqnarray} \]
The node displacements are
\[ \begin{eqnarray} u_1 = 3 & \qquad u_2 = 3 & \qquad u_3 = 3 \\ \\ v_1 = 2 & \qquad v_2 = 3 & \qquad v_3 = 1 \end{eqnarray} \]
The partial derivatives are
\[ \begin{eqnarray} \left[ \matrix{ {\partial u \over \partial X} & {\partial u \over \partial Y} \\ \\ {\partial v \over \partial X} & {\partial v \over \partial Y} } \right] & = & \left[ \matrix{ u_1 - u_3 & u_2 - u_3 \\ \\ v_1 - v_3 & v_2 - v_3 \\ } \right] \left[ \matrix{ X_1 - X_3 & X_2 - X_3 \\ \\ Y_1 - Y_3 & Y_2 - Y_3 \\ } \right]^{-1} \\ \\ \\ \\ & = & \left[ \matrix{ 0 & 0 \\ \\ 1 & 2 \\ } \right] \left[ \matrix{ \;\;\;0 & \;\;\;2\\ \\ -3 & -2 \\ } \right]^{-1} \\ \\ \\ \\ \\ \\ & = & \left[ \matrix{ 0 & 0 \\ \\ 1 & 2 \\ } \right] \left[ \matrix{ -0.333 & -0.333 \\ \\ \;\;\;0.500 & \;\;\;0.000 \\ } \right] \\ \\ \\ \\ \\ \\ & = & \left[ \matrix{ 0.000 & \;\;\;0.000 \\ \\ 0.667 & -0.333 \\ } \right] \end{eqnarray} \]
And add \( {\bf I}\) to get \({\bf F}\).
\[ {\bf F} = \left[ \matrix{ 1.000 & 0.000 \\ \\ 0.667 & 0.667 \\ } \right] \]
\[ {\bf R} = \left[ \matrix{ 0.928 & -0.371 \\ \\ 0.371 & \;\;\;0.928 } \right] \qquad \qquad {\bf U} = \left[ \matrix{ 1.176 & 0.248 \\ \\ 0.248 & 0.619 } \right] \]
So this element rotates
\[ \theta \quad = \quad \text{Sin}^{-1}(0.371) \quad = \quad 21.8^\circ \]